
Cellule électrique de batterie de paquet d'équipement intelligent d'Assemblée attachant la machine
1. Conditions de conception de cellule électrique attachant la machine :
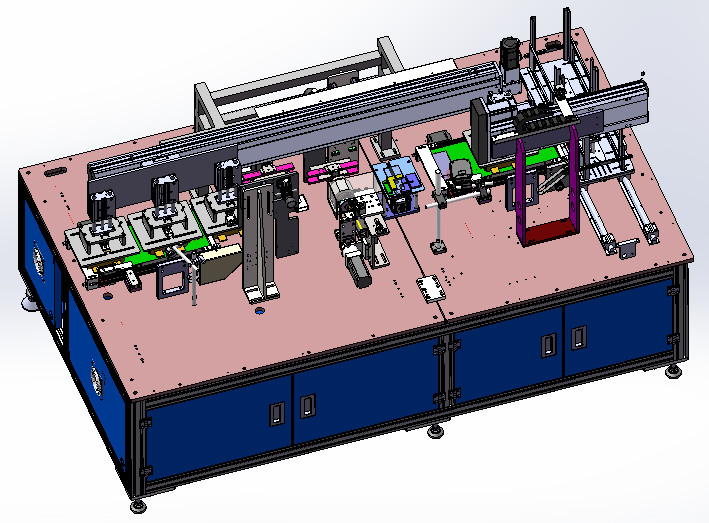
1.1. L'équipement est basé sur les conditions de conception de processus de la batterie attachant la machine, et la machine de cerclage automatique intelligente de batterie est manufacturée basée sur la conception de l'industrie 4,0. La chaîne de production inclut : mécanisme d'alimentation, manipulateur de alimentation, empilant et plaçant la station, empaquetant la position, la position de pulvérisation, et la ligne de décharge
1.3. États d'utilisation :
1.3.1 état d'alimentation d'énergie : approvisionnement d'alimentation secteur : 220V±15%
air comprimé 1.3.2 : ≥ 0.5mpa, 10L/30Min
1.3.3 température ambiante : 0℃ | 40℃.
hygrométrie 1.3.4 : 10 | 60%RH
1.4. Conditions de production :
1.4.1 condition d'aspect :
aspect uniforme de 1.4.1.1, aucune déformation ;
1.4.1.2 aucun trou d'épingle, marque d'écoulement, ou d'autres défauts ;
1.4.2 condition de taille :
1.4.2.1. Largeur 35-100mm de produit.
longueur de produit de 1.4.2.2 : 50-150mm
épaisseur de paroi de produit de 1.4.2.3 : 3.8-12mm
code barres de 1.4.3 batterie
1.4.3.1. Sur l'avant, employez le code imprimé par laser de qr ou collez code barres
1.5. Exigences de marche de la batterie attachant la machine :
Les conditions d'être rencontré sous la production normale conditionne ; Le mécanisme d'alimentation, plaçant le mécanisme, balayent l'opération de mécanisme, de mécanisme de liaison, de mécanisme de manipulateur, stable et fiable, simple ; Toutes les pièces mobiles devraient avoir raisonnable, fiable, facile d'utiliser le mécanisme de lubrification.
schéma de principe 1,5 d'équipement
taille de profession de l'équipement 1.5.1 (unité : millimètre) : 2300*1300*1500 (longueur * largeur * taille)
2. Composantes principales de cellule électrique attachant la machine :
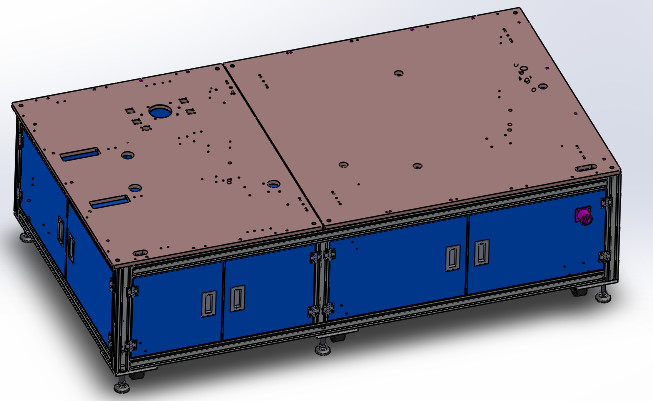
2,1, le support
2.2.1 le système de cadre est assemblés avec les profils 30X60 et les pièces en aluminium de tôle A3.
2.2. Station de chargement de matériel de plat
2.2.1 conditions de conception
la puissance de alimentation de 2.2.1.1 est conduite par le cylindre et deux boîtes de alimentation. Là placent des cloisons des côtés gauches et droits, mécanisme de levage,
Un côté est équipé du commutateur photoélectrique de détection
paramètres de processus de 2.2.1.2 : la largeur de positionnement peut être ajustée selon la taille de la batterie. Le niveau d'alimentation manuel est environ trois stations, et le manipulateur intermédiaire prend le niveau d'alimentation
configuration d'équipement de 2.2.2 canalisations
| Le numéro de série | Composition en système | La configuration de système | Le nombre de |
| 1 | Système de transfert | cylindre | 1 |
| Cours glissant | 2 | ||
| 2 |
Système de positionnement (GPS)
|
Bloc de positionnement d'article | 4 |
|
Partie usinée
|
1 | ||
| poubelle | 2 | ||
| Plate-forme de cueillette | 1 | ||
| 3 | 升 le système d'ascenseur | Moteur de levage | 1 |
| Ensemble de vis de levage | 1 |
fonction 2.2.3 : mettez manuellement la batterie de la pile de totalité de matériaux de disque sur la boîte matérielle, le commutateur photoélectrique de détection détecte que le cylindre du matériel est transféré à l'endroit moyen et attend le manipulateur de alimentation pour prendre le matériel, et les deux boîtes de alimentation circulent l'alimentation
manipulateur de alimentation de 2,3 batteries
2.3.2. Pièces principales d'équipement
2.3.2.1. Main de alimentation de batterie : elle se compose de servomoteur, de module de vis sans fin, de cylindre de commutateur de proximité, de levage, de groupe de plat d'aspiration, etc. La structure est simple et pratique.
2.3.2.1 .1 : le mouvement de groupe de surgeon est commandé par le moteur servo du module de vis pour le positionnement précis. Batterie de commutateur de proximité disponible.
2.3.2.1 .2 : l'objet est commode, continu, stable et fiable.
fonction 2,4 : dessinez la batterie dans le plateau au mécanisme de transfert de batterie et le plateau vide au mécanisme vide de collection de plateau
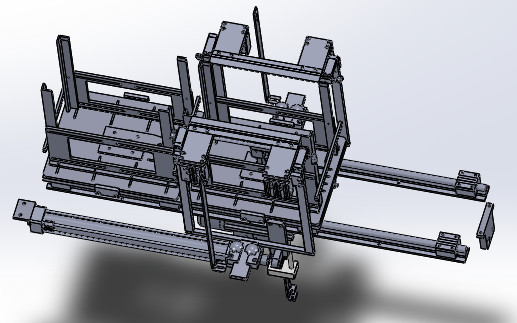
mécanisme de transfert de 2,4 batteries
24.1.1. Mécanisme de transmission de batterie : ce mécanisme se compose principalement de moteur de progression, de ceinture, de parenthèse, plaçant le cylindre, le commutateur de proximité, etc.
mécanisme de puissance de 2.4.2.1 : vitesse réglable.
2.4.2.2. La batterie est assurée sans dommages à la batterie en plaçant l'outillage
la position de 2.4.2.3 de placer l'outillage et la batterie peut être facilement ajustée, avec placer le ≤± 0.1mm d'exactitude
mécanisme de tension de ceinture de ceinture de 2.4.2.4
2.4.2.5 basent, le mécanisme se compose principalement d'embase et le positionnement de la goupille, plaçant la goupille plaçant, assurent la stabilité et la fiabilité, opération simple.
fonction 2.4.3 : transférez la batterie à partir du manipulateur de alimentation à la position et attendez le manipulateur de mesure de résistance de tension pour prendre le matériel
2.5.1.1. Mécanisme de balayage : ce mécanisme se compose principalement d'arme à feu de parenthèse, de balayage, etc.
l'angle de taille de parenthèse de 2.5.2.1 peut être ajusté arbitrairement
fonction 2.5.3 : balayez le code de qr sur la surface de batterie pour rassembler les données originales de la batterie et pour les transmettre au système informatique.
2.6.1.1 le dispositif se compose principalement de parenthèse, cylindre de levage, sonde photoélectrique de capteur, bloquent et ainsi de suite.
2.6.2.1 la parenthèse peut être ajusté arbitrairement selon la taille de batterie
fonction 2.6.3 : empilez et placez la cellule.
2.7.1.1. Mécanisme de rotation : ce mécanisme se compose principalement de moteur de progression, de ceinture, de parenthèse, plaçant le cylindre, le commutateur de proximité, etc.
bande de 2.7.2.1 plaçant le mécanisme : vitesse réglable,
2.7.2.2. La batterie est assurée sans dommages à la batterie en plaçant l'outillage
2.7.2.3. Le positionnement de l'outillage et de la batterie peut être ajusté commodément, avec placer le ≤± 0.1mm d'exactitude
mécanisme de tension de ceinture de ceinture de 2.7.2.4
2.7.2.5 basent, le mécanisme se compose principalement d'embase et le positionnement de la goupille, plaçant la goupille plaçant, assurent la stabilité et la fiabilité, opération simple.
fonction 2.7.3 : attachez du ruban adhésif ensemble aux cellules électriques prises du manipulateur horizontal
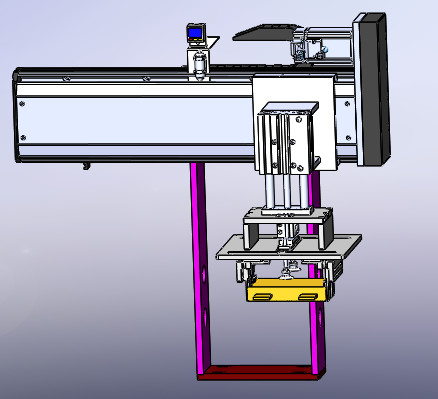
manipulateur de alimentation de 2.8.1.1 : ce mécanisme se compose principalement de parenthèse, de cylindre de levage, de module de tige de vis, de disque d'aspiration, de tige de réglementation, etc.
2.8.2.1 la parenthèse peut être ajusté arbitrairement selon la taille de batterie
fonction 2.8.3 : prenez la batterie du mécanisme de transfert de cellules à l'ensemble de positionnement de cerclage de gabarit
2.9.1.1. Codez le mécanisme de balayage : ce mécanisme se compose principalement de parenthèse, d'arme à feu de code, etc.
l'angle de taille de parenthèse de 2.9.2.1 peut être ajusté arbitrairement
fonction 2.9.3 : selon les types de batterie classifiés par l'ensemble d'analyse de données du système informatique, différents codes sont pulvérisés sur la surface de batterie.
2.10.1.1. Mécanisme de transmission de batterie : ce mécanisme se compose principalement de moteur de progression, de ceinture, de parenthèse, plaçant le cylindre, le commutateur de proximité, etc.
mécanisme de puissance de 2.10.2.1 : vitesse réglable,
2.10.2.2. Aucun dommage à la batterie n'est garanti en plaçant l'outillage
2.10.2.3. Le positionnement des outils et des batteries peut être facilement ajusté, avec placer le ≤± 0.1mm d'exactitude
mécanisme de tension de ceinture de ceinture de 2.10.2.4
2.10.2.5 basent, le mécanisme se compose principalement d'embase et le positionnement de la goupille, plaçant la goupille plaçant, assurent la stabilité et la fiabilité, opération simple.
fonction 2.10.3 : la batterie prise du manipulateur horizontal attend le code à pulvériser et être fourni au niveau matériel du robot
1. Nouvelle promesse d'équipement
Notre société garantit que les marchandises fournies aux clients sont équipement tout neuf, complet et inutilisé.
2. Engagement de confidentialité
Notre société promet que sans autorisation écrite d'aucune partie, de l'autre les dessins connexes partie, l'information technique, des renseignements commerciaux et d'autres secrets de secret d'affaires et techniques ne doivent pas être coulés aux tiers de quelque façon.
3. Engagement de service après-vente
(1) pendant deux mois de la date de l'expédition de l'équipement, la partie B est responsable des défauts non-humains dans une garantie opportune et libre d'ici un an (quand l'équipement est défectueux, le personnel de service après-vente répondra d'ici 2 heures après réception de l'avis. Selon la situation, le personnel doit être en place d'ici 48 heures. Pas plus tard que 60 heures, pour assurer la continuité de la production par l'acheteur ;
(2) après l'équipement a passé la période de garantie, s'il y a un problème, les deux parties communiquent et traitent lui. S'il y a lieu, le personnel après-vente sera envoyé pour le réparer, et seulement le coût sera imputé. Zh
(3) au cours de la période de garantie stipulée dans le contrat et l'accord technique signés par les deux parties, la société fournira une garantie pour les problèmes de qualité qui ne sont pas provoqués par des dommages humains pendant l'utilisation normale de nos produits.













